0% read
最后更新:
SeeSaw
SeeSaw 是一个移动应用程序和数据众包平台,由 Virtuals Protocol 开发,旨在帮助用户为机器人和具身人工智能 (AI) 研究做出贡献。该应用程序采用“教学即赚取”模式,激励用户录制并提交日常任务的短的第一人称(自我中心)视频,以换取积分和其他奖励。SeeSaw 于 2025 年 10 月推出,是 BitRobot 网络上的第五个子网 (SN/05),也是“Virtuals Robotics”计划的核心组成部分。 [1] [2]
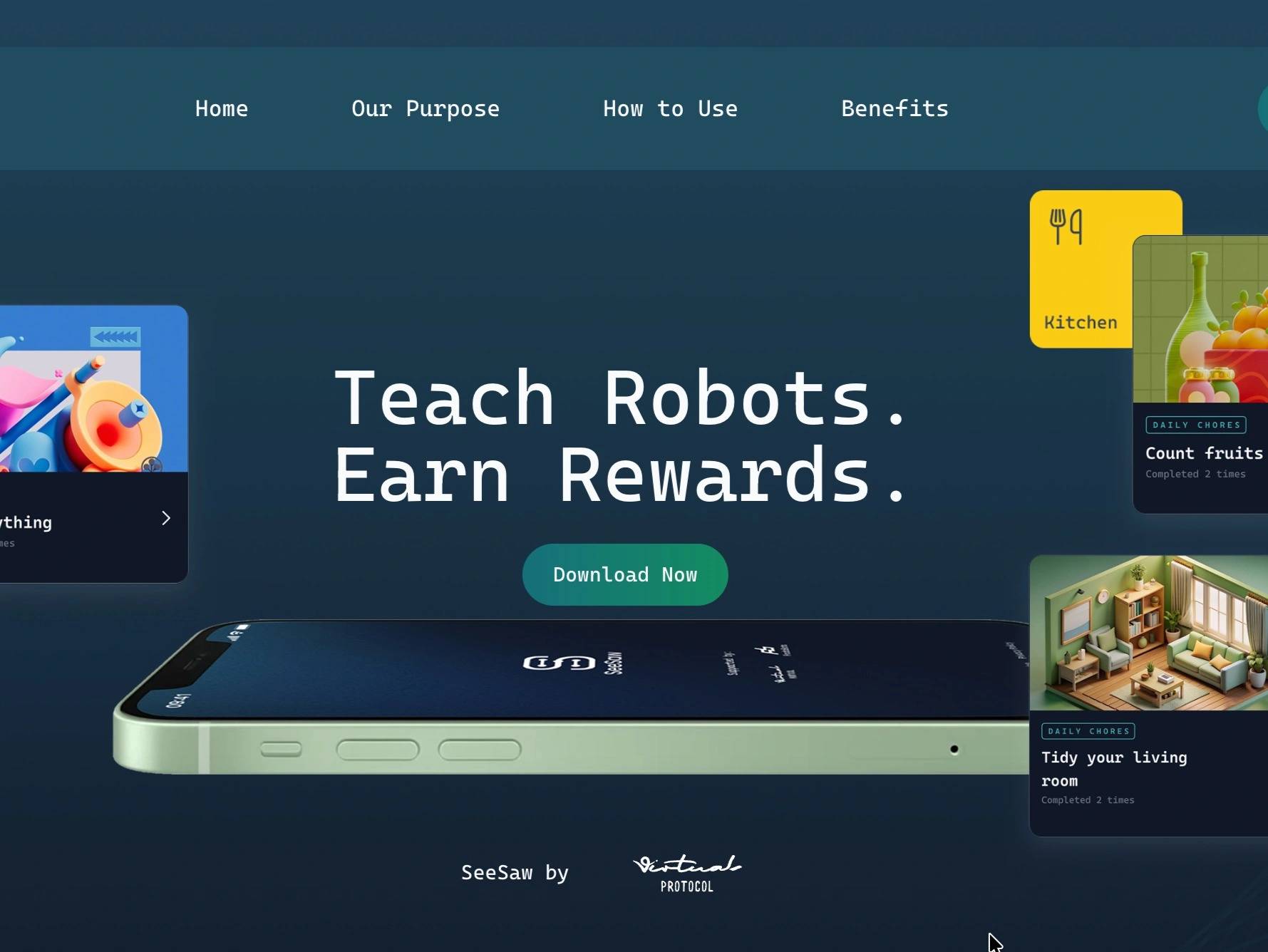
该项目的主要任务是解决数据稀缺问题,这个问题阻碍了能够在真实环境中运行的机器人的开发。 [1] 通过从全球用户群收集大规模、多样化和自然的人类行为数据集,SeeSaw 旨在为 AI 模型提供必要的训练数据,以学习物理任务。该项目的标语是“教机器人。赚取奖励。” [1] 收集的视频数据提供给 BitRobot 网络上的研究人员和开发人员,以提高机器人的感知和运动能力。 [2]
概述
创建 SeeSaw 是为了弥合 AI 的推理能力和物理能力之间的差距。正如项目网站上所说,“AI 现在可以推理,但仍然无法行动。” [1] 该平台解决了机器人从真实、非脚本数据而不是从模拟或预先编写的数据集中学习最有效这一挑战。 [2] SeeSaw 通过将用户的日常活动转化为机器的宝贵训练材料来获取这些数据。 [[1]](#cite-id-0WoUi0lCACAbDUI5]
该平台采用游戏化的用户体验设计。参与者使用 SeeSaw 移动应用程序从“任务”列表中进行选择,这些任务是小型的视频录制任务。这些任务涉及常见的活动,如制作三明治、清洁厨房台面、叠衣服或系鞋带。 [2] [3] 用户从第一人称视角拍摄任务,通过应用程序提交视频,并在成功验证后获得积分。这些积分可以兑换奖励,包括商品和数字代币。 [[1]](#cite-id-0WoUi0lCACAbDUI5]
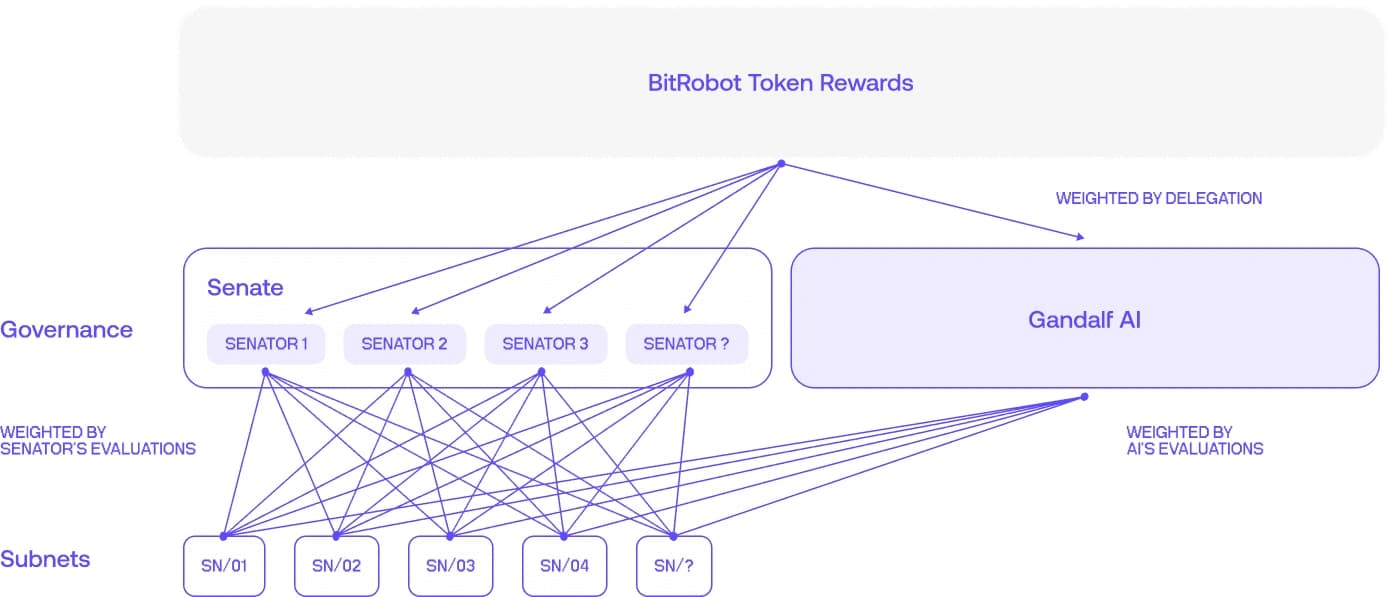
SeeSaw 是两个更大的生态系统 Virtuals Protocol 和 BitRobot 网络不可或缺的一部分。它由 Virtuals 开发,是其“Virtuals Robotics”计划的一部分,该计划位于组织在 Base 区块链上的“AI Agent Hub”中。 [3] 同时,它作为 BitRobot 网络上的子网 5 运行,该平台被设计为“开放机器人实验室”,为机器人开发提供共享基础设施。这种集成使 SeeSaw 能够利用 BitRobot 的基础设施进行协调、数据验证和奖励分配。 [[2]](#cite-id-C0h3wIWlUFuh8doi]
历史
SeeSaw 的发布发生在 2025 年 10 月下旬的几天内,通过其母公司发布的一系列公告。
2025 年 10 月 21 日,Virtuals Protocol 宣布推出“Virtuals Robotics”,这是其生态系统中专门用于机器人项目的一项新计划。这为 SeeSaw 的首次亮相奠定了基础。 [3] SeeSaw 官方网站也在此时上线,概述了该项目的使命和功能。 [1]
2025 年 10 月 22 日,BitRobot 正式宣布 Virtuals 的 SeeSaw 将作为 SN/05(子网 5)加入其平台。 [2] 第二天,即 2025 年 10 月 23 日,Virtuals 和 BitRobot Network 联合发布了 SeeSaw 应用程序,iOS 版本已确认上线并可供下载。 [3]
2025 年 11 月 13 日,BitRobot 的一篇博文证实 SeeSaw 应用程序已上线并积极收集数据。该帖子提供了有关其功能、与 BitRobot 网络的集成以及验证系统作用的更多详细信息。 [2]
技术和功能
SeeSaw 的平台结合了移动技术、游戏化的界面和去中心化的网络基础设施,以促进机器人技术的大规模数据收集。
用户工作流程
用户贡献数据的过程被设计为简单且基于任务:
- 注册: 用户从 App Store 下载 SeeSaw 应用程序,并使用电子邮件地址注册帐户。 [2]
- 选择任务: 在应用程序中,用户可以浏览可用的“任务”列表。每个任务都提供一个提示和关于日常任务的短视频录制的具体说明。 [1]
- 录制和提交: 用户按照指示录制一段简短的、以自我为中心的执行任务的视频,并通过应用程序上传剪辑。 [1]
- 验证和奖励: 提交的视频经过验证过程。成功验证后,用户将因其贡献而获得积分和其他奖励。 [2]
数据收集和目的
SeeSaw 的核心功能是收集以自我为中心的视频数据。这种第一人称视角对于训练机器人从类似人类的视角理解世界并与之互动至关重要。 [1] 这些数据旨在自然且非脚本化,捕捉人类在真实环境中执行任务的细微差别。 [2]
收集和验证后,此视频数据将成为“合格数据”,可供 BitRobot 网络的生态系统使用。从事机器人技术工作的其他子网、研究人员和开发人员可以使用此数据集来训练和改进用于机器人感知和运动的 AI 模型。 [2]
游戏化和激励
SeeSaw 采用游戏化系统来鼓励用户参与和数据贡献。该平台具有任务、促进竞争的排行榜和基于积分的奖励系统。 [1] 用户为每次成功验证的视频提交赚取积分。这些积分可以累积,以后可以兑换奖励,据称包括有形商品和数字代币。 [1]
除了直接奖励外,SeeSaw 子网 (SN/05) 的早期参与者还有资格获得未来计划在整个 BitRobot 网络中分发的“全网络奖励”。 [2]
验证系统
为了确保众包数据的质量和实用性,SeeSaw 与 BitRobot 网络的 可验证机器人工作 (VRW) 系统集成。 [2] 这种验证机制旨在确认每个视频提交都是对训练数据集的有效且有价值的贡献。它验证任务是否按要求执行,并在向贡献者发放奖励之前,为集体研究工作增加可衡量的价值。 [2]
生态系统和合作伙伴关系
SeeSaw 存在于几个专注于 AI 和机器人技术的组织和计划的交汇处。该项目是其开发者 Virtuals Protocol 和其主机 BitRobot Network 之间的合作成果。 [3]
Virtuals Protocol
Virtuals Protocol 是 SeeSaw 应用程序的主要开发者,也是负责创建其面向用户的功能(如任务和排行榜)的实体。 [2] 该协议背后的法律实体是 Virtuals Digital S.A.。 [1]
Virtuals 创建 SeeSaw 是为了实现其更广泛的使命,即构建“让智能在世界中移动的系统”,并修复其所谓的由缺乏资本和数据引起的机器人技术中的“破碎”基础设施。 [1] 为此,Virtuals 生态系统建立在两个主要支柱之上:
- SeeSaw(数据生成): 旨在解决机器人数据问题的数据众包应用程序。
- Unicorn(资本形成): 一个独立的 Virtuals 项目,旨在通过为机器人领域的“前沿建设者创建流动、链上资本形成”来解决资金问题。
SeeSaw 和 Unicorn 共同旨在创建一个自我强化的循环,将资金、数据和执行连接起来,以进行机器人开发。 [1] SeeSaw 也是“Virtuals Robotics”计划的一部分,将其置于 Virtuals 在 Base 区块链上的“AI Agent Hub”中。 [3]
BitRobot Network
SeeSaw 作为 BitRobot Network 上的一个专门子网运行,该网络为应用程序提供基础架构。 [2] BitRobot Network 的使命是构建“世界开放机器人实验室”,这是一个用于推进机器人技术的共享基础设施。该网络在 SeeSaw 项目中的作用包括:
- 托管: SeeSaw 作为 SN/05 运行,是网络上的第五个子网。
- 协调: 该网络管理数据贡献者的分布式网络。
- 验证: 它提供 VRW 系统来验证所有数据提交。
- 奖励: 它促进向用户进行链上奖励分配。
BitRobot Network 本身是由 FrodoBots Lab 和 Protocol Labs 联合开发的项目。 [3]
代币经济学
截至 2025 年 11 月初,SeeSaw 项目尚未发行自己的原生代币。 [3] 但是,该平台的激励机制明确包括“数字代币”作为用户可以通过兑换从数据贡献中收集的积分来赚取的奖励之一。 [1] 这表明,虽然 SeeSaw 可能没有独特的项目代币,但它参与了基于代币的奖励经济,可能与更广泛的 Virtuals 或 BitRobot 生态系统相关。
未来发展
发布后,Virtuals 宣布计划通过其他功能扩展 SeeSaw 平台,以推动用户参与和数据收集。该路线图包括引入新的任务类型和任务、启动限时排行榜以及为 SN/05 上的所有贡献者创建子网范围内的挑战。早期参与者还有望获得积分,这些积分将计入未来将在整个 BitRobot 网络中推出的“全网络奖励”。 [2]
发现错误了吗?
平均评级
暂无评分
您的体验如何?
给这个维基一个快速评分让我们知道!
编辑者
2025年11月17日。21:06 UTC
编辑摘要:
Added SeeSaw wiki page