0% read
MechaOS
MechaOS
MechaOS is a decentralized framework designed to connect real-world robots to the Ethereum blockchain, enabling them to perform tasks assigned via smart contracts and receive payments autonomously. The system functions as a bridge between blockchain technology and physical robotics, allowing machines to operate as independent economic agents. [1] [2]
Overview
MechaOS is a decentralized operating system that links Ethereum smart contracts with physical robots, creating a framework where machines can act as independent economic agents. Each robot is assigned an Ethereum wallet that enables it to accept tasks, receive payments, and submit verifiable proof of completed work. Tasks published on-chain are translated into ROS2 commands, executed in the physical world, and recorded on the blockchain through logs, sensor data, and hashed outputs. This structure allows robots to operate autonomously while ensuring transparency and accountability.
The system functions as a two-sided marketplace within the Decentralized Physical Infrastructure Network (DePIN) sector. Users define and fund tasks through smart contracts, while robots discover, execute, and verify them without intermediaries. Payments are automatically released once proofs are validated, producing an immutable record of work and compensation. By addressing challenges such as fragmentation and centralized control in robotics, MechaOS aims to provide a standardized coordination layer that connects machines, digital wallets, and computational resources, supporting the development of decentralized robotic economies. [1] [6]
Architecture
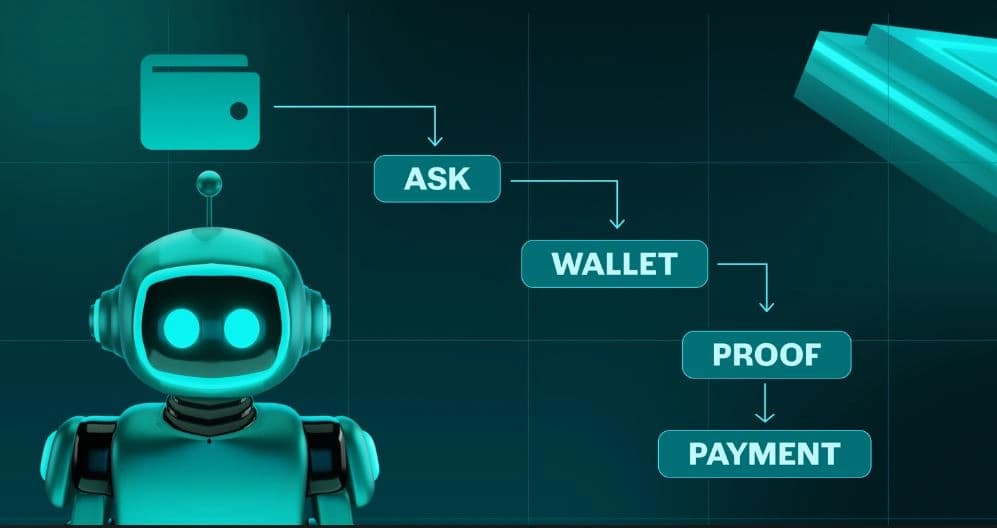
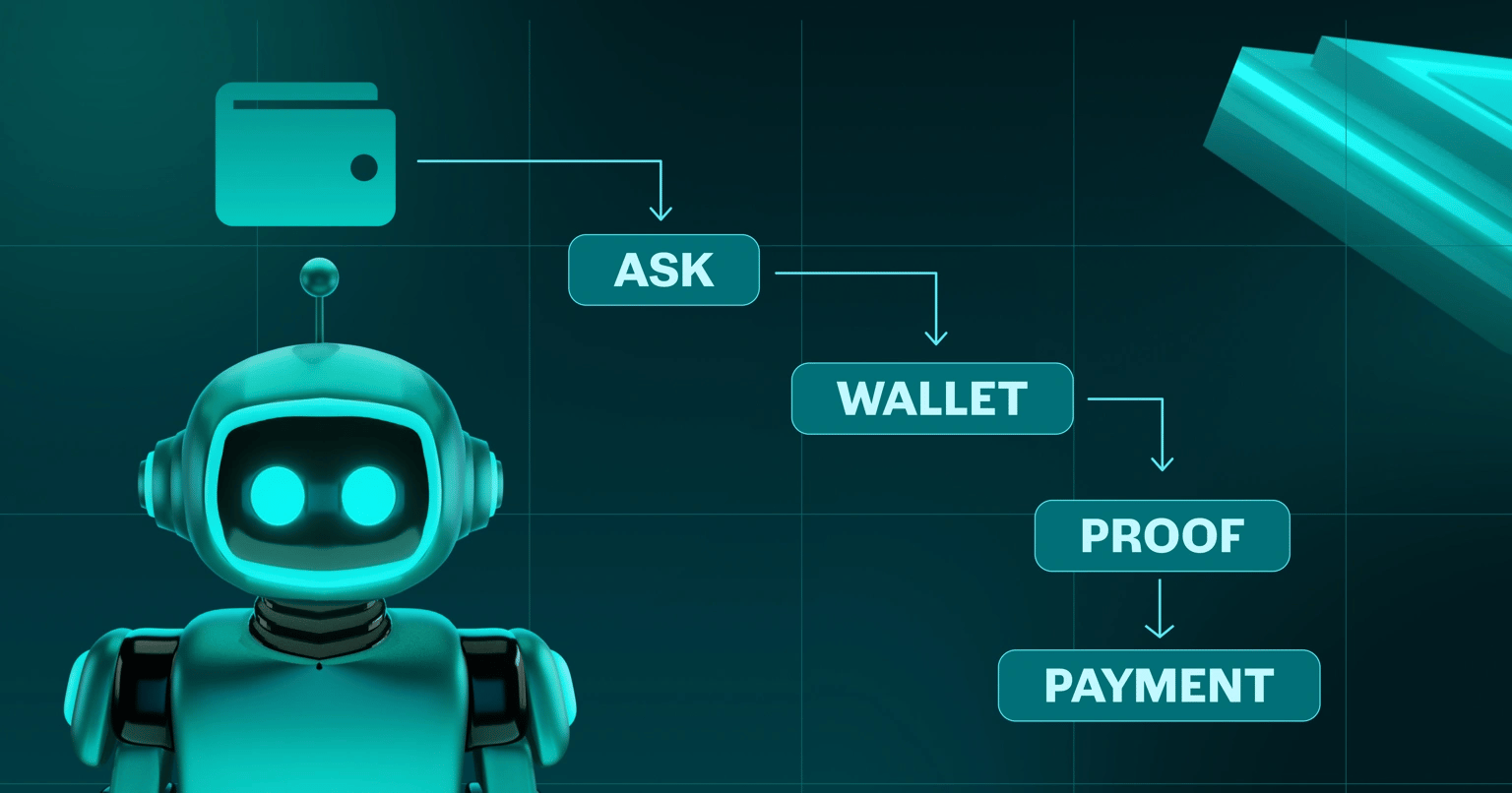
MechaOS integrates blockchain with standard robotics operating systems to coordinate, verify, and transparently record physical tasks. Its architecture is designed to manage the interaction between on-chain instructions and robotic hardware, ensuring that every step of the workflow—from task assignment to payment—is both traceable and verifiable. By embedding robotic operations directly into smart contracts, the system creates a reliable framework for autonomous machine labor.
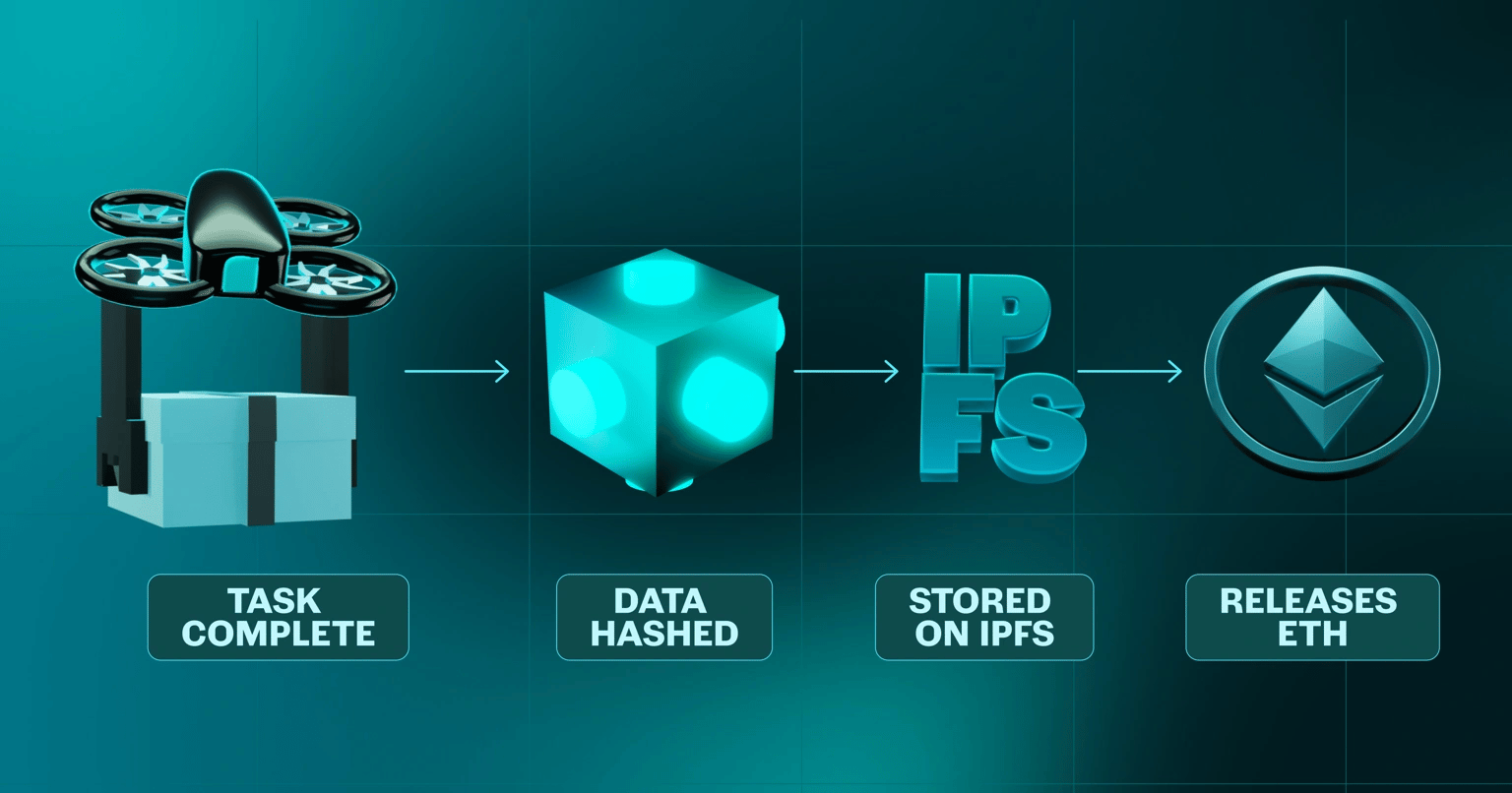
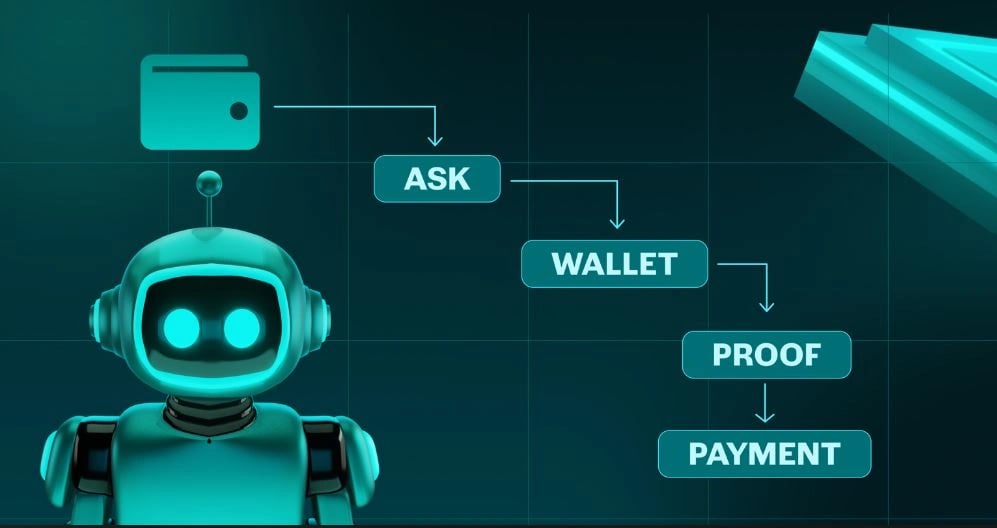
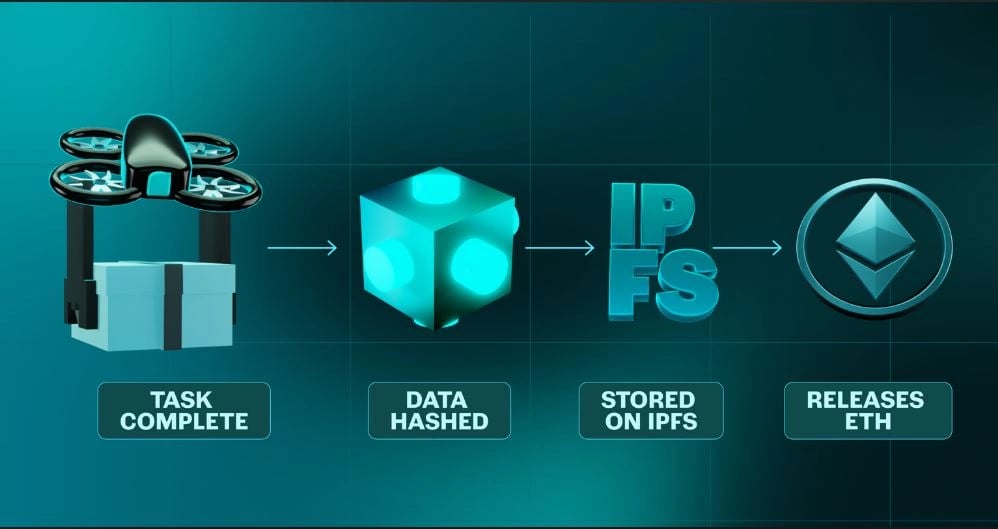
The workflow follows five stages. A user begins by defining a task, such as delivery or inspection, and stakes funds in cryptocurrency, which are held in escrow by a smart contract. The contract encodes the task requirements on Ethereum, acting as an immutable agreement. Robots in the network can then discover and accept the task, with instructions converted into ROS2 commands that their systems can execute. During execution, robots collect sensor data, logs, and hashed outputs to build a verifiable record of their work. This proof is submitted on-chain for validation, and once confirmed, the smart contract automatically releases payment to the robot’s wallet. This process creates a trustless pipeline where robotic actions are both autonomously executed and economically settled without intermediaries. [1] [2]
Features
Robot Wallets
In MechaOS, every robot is assigned a unique Ethereum wallet that acts as its digital identity and financial interface on the blockchain. Through this wallet, robots can accept tasks, receive and store payments, and submit verifiable proof of their work. The process also establishes a record of trust and reputation within the network, allowing each robot to build a transparent history of performance.
By equipping robots with wallets, the system enables them to function as autonomous economic agents. They can manage funds, pay for resources such as energy or data, and handle earnings independently. This approach is central to MechaOS’s goal of creating machines that not only execute physical tasks but also participate directly in decentralized, on-chain economies without reliance on human intermediaries. [7]
ETH to ROS2 Bridge
Within MechaOS is its built-in bridge that translates commands from Ethereum smart contracts into actions compatible with the Robot Operating System 2 (ROS2). ROS2 is a widely adopted, open-source framework of software libraries and tools for building robot applications. By converting high-level Solidity smart contract calls into low-level ROS2 commands, the bridge allows developers to control and coordinate robotic motion and operations directly from the blockchain. This component effectively closes the loop between the digital, decentralized world of smart contracts and the physical, operational world of robotics, enabling on-chain logic to direct real-world actions. [6]
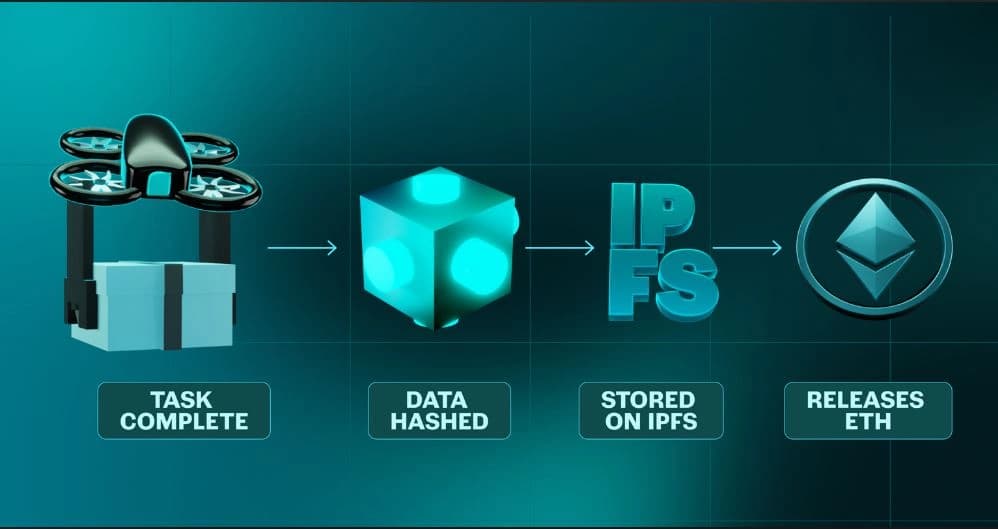
On-Chain Proof of Work
To establish trust and ensure the integrity of the marketplace, MechaOS employs a robust on-chain proof-of-work system. When a robot completes a task, it is required to generate and submit an "untamperable trail of proof" to the blockchain. This proof is not a computational puzzle like in Bitcoin mining, but rather a cryptographic verification of physical work performed. It consists of a collection of data points, including sensor data (e.g., GPS coordinates, camera images), operational logs, and cryptographically hashed outputs. This data creates an immutable and verifiable record that proves the task was executed according to the specifications laid out in the smart contract. This mechanism eliminates the need for a central authority to validate work, as verification is handled cryptographically on-chain. [8]
Proof Validators
The MechaOS network is secured by participants known as "Proof Validators." These validators are stakers who are responsible for verifying the proof-of-work data submitted by the robots. By reviewing the on-chain data, they ensure the integrity of the task marketplace and confirm that robots have completed their assigned jobs correctly. This validation role is crucial for maintaining the security and reliability of the network, preventing fraudulent activity, and ensuring that payments are only released for legitimately completed work. The staking mechanism aligns the incentives of the validators with the overall health of the ecosystem. [8]
Additional Features
MechaOS is structured to allow robots to act as independent economic participants. Machines on the network can autonomously identify tasks, execute them, provide verifiable proof of completion, and receive payment without ongoing human involvement.
The system also introduces models that extend participation and value creation. RobotFi pools enable fractional ownership of robotic fleets, allowing multiple stakeholders to co-own and share in revenue from deployed machines. A planned telemetry marketplace would enable robots to monetize operational data, such as sensor readings and environmental mapping, for use in research, AI training, and logistics optimization. Beyond individual machines, fleets are treated as modular components of a Decentralized Physical Infrastructure Network (DePIN), supporting scalable service networks that are collectively governed rather than centrally managed. [2]
MECHA
$MECHA is the native token of MechaOS, functioning as the medium of exchange for tasks, proofs, and payments within the system. It replaces centralized billing models by embedding incentives directly into the network, with all fees and transactions flowing through the token. Participants, including robot operators, validators, and developers, use $MECHA to engage with and contribute to the system. Its main roles are staking for security and reputation, enabling payments for robotic services and coordination, and providing governance over protocol development and standards. The token underpins a closed-loop economy where demand for robotic services drives demand for $MECHA, positioning it as the settlement layer for machine-to-machine transactions. [5]
Token Allocation
The total supply of 100,000,000 $MECHA tokens is distributed across several categories: [5]
- Liquidity: 70%
- Node Incentives and Staking: 7.5%
- Business Development: 7.5%
- Treasury: 5%
- Research and Development: 5%
- Team: 5%
Partnerships
See something wrong?

Average Rating
No ratings yet, be the first to rate!
How was your experience?
Give this wiki a quick rating to let us know!
Edited By
On September 30, 2025. 24:24 UTC
Edit summary:
Style: Adjust heading levels for improved article structure.